ロボットティーチング
動き・位置を高精度にデータ取得し、ロボット制御に活用します。
生産現場の自動化や省人化といった課題に解決します。
ロボット・ドローン制御で生産現場の自動化を
促進するためのOptiTrack
ロボット・ドローン等の挙動解析を0.1mm以下の精度で実現
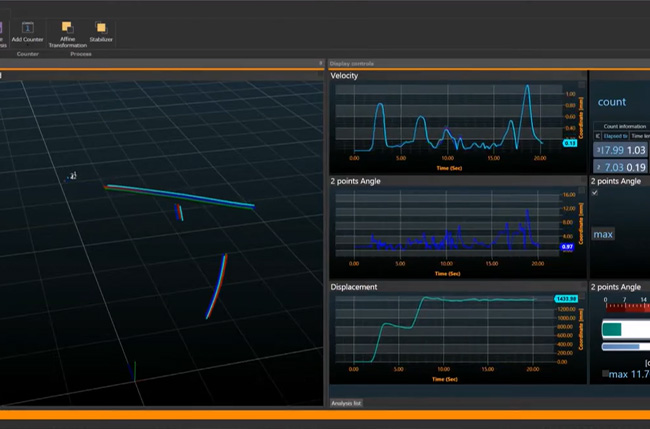
ロボットやドローンの挙動を正確に計測が可能です。位置座標だけでなく姿勢情報を含めた6自由度の情報や、変位、速度、加速度などのさまざまな物理量に変換し、計測が可能です。
複数台の同時計測や周辺機器、設備の挙動も合わせて計測が行え、開発、実証実験、生産性向上などさまざまなシーンでご利用いただけます。
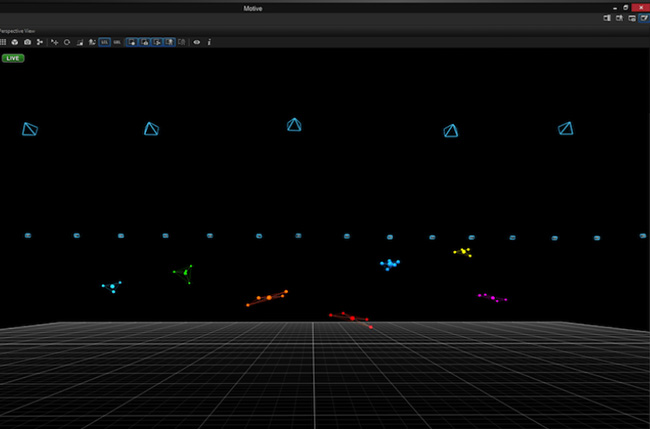
対象の位置同定をする屋内GPSとして
ロボットやドローン、AGVなど移動する対象の位置同定を行うための座標値取得が可能です。屋内ではGPSでは実現できない位置同定を正確に高精度に行うことができ、制御、計測などさまざまなシーンで利用できます。
5msec以下の遅延でリアルタイムにデータをストリーミングでき、リアルタイムでの位置同定が可能です。ロボットの相対制御やティーチングの補正システム、ドローンの複数編隊飛行などの実績があります。

製造現場でも安定したトラッキングが可能
直進性の高い赤外光ストロボ、専用カメラフィルタ、画像処理アルゴリズム等により製造現場でも安定して現場で計測が可能です。アーク溶接など強い光を発光する対象がある場合でも対象の動きを安定して計測が行えます。
又、複数のマーカーからオフセットさせた仮想点を作成、トラッキングする機能も搭載し、マーカーを物理的に取り付けできない加工点の計測も行えます。

OptiTrackをリアルタイムセンシングデバイスとして利用できる無償の開発キットを提供
OptiTrackからは5msec以下の低い遅延でリアルタイムにデータストリーミングが可能です。出力されたデータをロボットやドローン等に利用するための開発キット(API,SDK)がユーザー様へ無償で提供されます。
各種プラグイン、サンプルコードも充実しておりセンシングデバイスとして広く活用が可能です。
活用事例
-
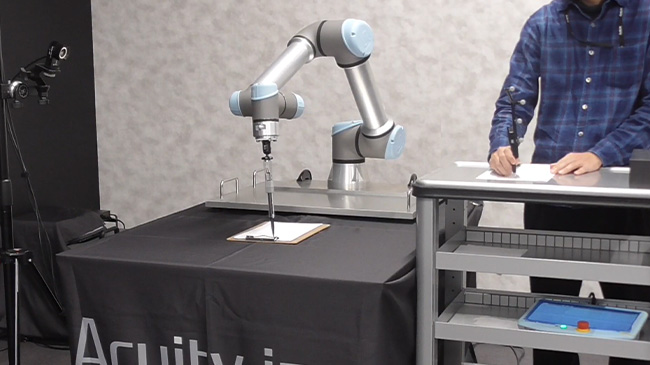
- 熟練技術をロボットで再現
工具による手作業
ロボットティーチングをロボット専用コントローラーを使用せず、カメラで行った事例。手に持った工具等の位置・姿勢をOptiTrackカメラで取得し、ロボットへ連携。
-

- ロボットの遠隔操作
加工作業・溶接作業
VR空間で行う加工作業をリアルタイムでロボットに再現させた遠隔操作の事例。作業者の手元の加工ジグとロボットの目の前の加工対象をセンシングして実施。
-

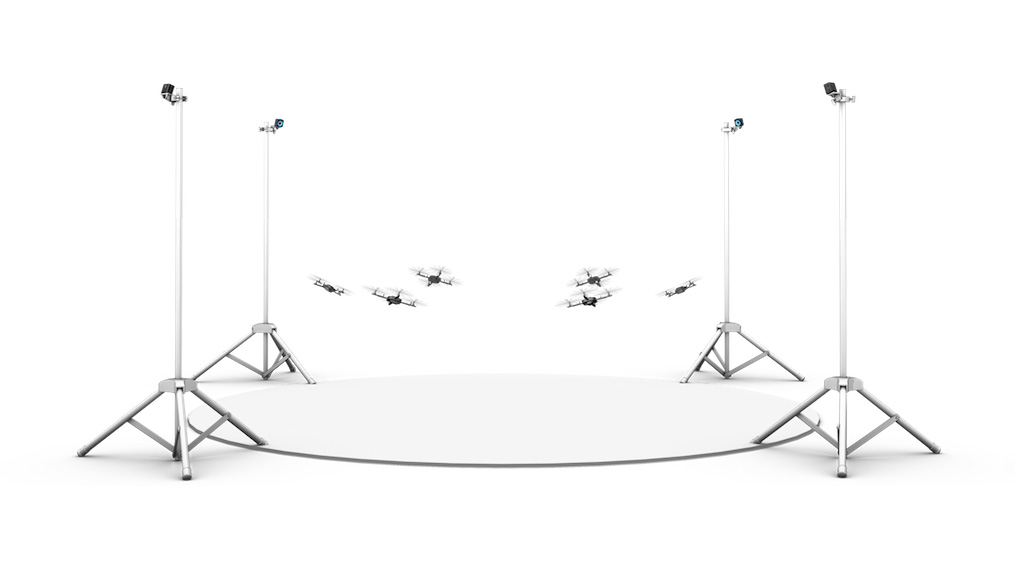
- ドローン制御
ドローン
すべてのドローンの位置をカメラで取得し、動きを制御した事例。これによりイベントでは音楽に合わせて、また撮影のため、工場監視等に活用できます。
お客様の声
-
- 様々な課題に対応できる唯一のシステムでした
-
導入以前は、ティーチングに時間が掛かる点が一番大きな課題となっていました。オンラインでティーチングをするにはスキルが必要で、ティーチングに伴う準備や負担も大きく、実用的ではありませんでした。かといってオフラインによるティーチングも修正等の後処理で工数が掛かるといった課題がありました。
ティーチングに掛かる工数や精度、応答性等、すべての課題を解決してくれ、実用向きだったのが本システムです。高精度かつ、リアルタイム性に優れている点は非常に魅力的で、導入後の効果もはっきりと出ています。
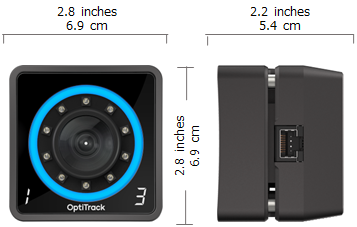
システム構成PrimeX 13Wを使った場合の構成例
-
- 解像度(pixel)
- 130万画素
-
- フレームレート(fps)
- 30-240(2.X) 20-1,000(3.X)
-
- レンズ視野角※1(°)
- 82
※1 レンズ視野角は、水平方向の視野角です。
システム構成例
- PrimeX 13Wカメラ 4台
- カメラケーブル
- コンパクトハブ
- ハブケーブル
- キャリブレーションワンド
- キャリブレーションスクエア
- 反射マーカー(10個セット)
- マーカーベース(10個セット)
- 三脚
- ソフトウェア Motive: Tracker
- ソフトウェア HardKey
- 解析ソフトウェア SKYCOM
- PC
- 設置調整料
- 年間サポート料
PC動作環境(推奨)
- Windows 10以降(64bit)
- Intel®Core™ i3プロセッサー以上(推奨Core i7)
- 4GB以上のメモリ(推奨8GB以上)
OptiTrack製品だからこそ高精度・低工数で変位計測が可能。
詳しいシステム概要や導入フロー、OptiTrackを活用した変位計測事例は、下記ページよりご覧ください。
詳細ページを開く
